
Hybrid NVH Modeling
Die ständig steigenden Anforderungen in Bezug auf kürzere Entwicklungszeiten und Kosteneinsparungen führen dazu, dass wichtige Designentscheidungen bereits in einem frühen Stadium des Entwicklungsprozesses getroffen werden müssen, was wiederum den Einsatz von virtuellen Prototypen erfordert. Die Kombination von Simulation und Test kann den Ansatz, Zeit zu sparen und Kosten zu senken, weiter vorantreiben. Darüber hinaus erhöht sich des Öfteren die Ergebnisgenauigkeit im Vergleich zu Ansätzen, die ausschließlich auf numerischen Modellen einerseits oder experimentellen Ergebnissen andererseits basieren. Die Wahl des optimalen Ansatzes hängt von der Aufgabe und der Datenverfügbarkeit (zur Erstellung virtueller Prototypen), den Methoden (zur Modellierung bestimmter physikalischer Phänomene) und den physikalischen Prototypen ab. In einer vernetzten Welt, in der Entwicklungsprozesse auf verschiedene Unternehmen verteilt sind, wird die Verfügbarkeit von Daten und physischen Prototypen sogar noch entscheidender: Unternehmen müssen Produktmerkmale austauschen, um Systemmodelle zu erstellen, wollen aber möglicherweise keine Entwicklungskenntnisse oder Details des Produktdesigns weitergeben.
Ein Beispiel aus der Praxis
In diesem Blogbeitrag zeigen wir Ihnen am Beispiel eines E-Bikes, wie eine kombinierte Methode aus Messung und numerischer Simulation zur Vorhersage und Analyse der Geräusch-, Vibrations- und Harshness-Eigenschaften (NVH) allen zuvor genannten Anforderungen und Einschränkungen gerecht wird.
In diesem konkreten Fall bauen wir die elektrische Antriebseinheit eines bereits in Serie produzierten E-Bikes virtuell in ein numerisches Modell eines neuen E-Bike-Prototyps ein, wie in der folgenden Abbildung zu sehen ist.

Experimentelle Daten
Die Anregung und die Strukturdynamik der elektrischen Antriebseinheit werden aus Experimenten mit der Methode der äquivalenten Kräfte (EFs) abgeleitet, besser bekannt als in-situ blocked forces [1, 3]. Diese Art der Quellenbeschreibung kennen Sie vielleicht aus der experimentellen Transferpfadanalyse. Um solche "quellenbeschreibenden Kräfte" von einem Testfall auf ein Simulationsmodell zu übertragen, müssen diese Kräfte ausschließlich eine Eigenschaft der Quelle - unserer Antriebseinheit - sein und dürfen nicht zur Empfängerstruktur - der Baugruppe, die die Antriebseinheit hält - gehören.
Das bedeutet, dass die in-situ blocked forces der elektrischen Antriebseinheit die gleichen sind für den elektrischen Antrieb, der in einem Prototyp oder einem Serien-E-Bike montiert ist - und deshalb brauchen wir in-situ blocked forces anstelle von direkt gemessenen Betriebskräften, die sowohl eine Eigenschaft der Quelle als auch der Struktur sind, die die Quelle hält.
Das numerische Modell
Außerdem erstellen wir ein numerisches Modell zur Vorhersage der strukturellen Dynamik des E-Bike-Prototyps mit Hilfe einer Bottom-up-Methode. In diesem Fall bedeutet der Begriff Bottom-up-Methode, dass das System in mehrere Teilmodelle unterteilt wird, die wir separat validieren können. Für jedes Teilmodell werden der Detaillierungsgrad und der Abstraktionsgrad an die verfügbaren Daten und das zu lösende Problem angepasst. Das numerische Modell besteht aus der Antriebseinheit, der Batterie, dem Rahmen, der Gabel, der Hinterradschwinge, dem Vorderrad und den vorderen und hinteren Stoßdämpfern. In diesem Fall gehen wir davon aus, dass der Rahmen des E-Bikes, insbesondere sein unteres Rohr, die meiste Schallenergie abstrahlt, weshalb er als flexibles Teil modelliert werden muss.
Eine Herausforderung war der Rahmen aus kohlefaserverstärktem Kunststoff, bei dem wir die Dicke, die Ausrichtung und die Materialeigenschaften der verschiedenen Schichten berücksichtigen mussten. Wir sind davon ausgegangen, dass auch der Akku und die Antriebseinheit die Strukturdynamik des E-Bikes beeinflussen, aber für diese Komponenten liegen keine Daten vor. Daher haben wir als Vorstudie Modalanalysen durchgeführt, um festzustellen, wie sich die Strukturen der jeweiligen Komponenten verhalten.
Das hybride Modell
Wir haben das numerische Modell der Strukturdynamik mit einem Modell gekoppelt, das die Abstrahlung anhand der Oberflächengeschwindigkeiten auf dem Rahmen vorhersagt (siehe Abb. 1). Beide Modelle addieren sich zu einem Satz vibroakustischer Übertragungsfunktionen von verschiedenen Anregungspunkten an der Schnittstelle zwischen dem elektrischen Antrieb und dem Rahmen zu verschiedenen Mikrofonen rund um das E-Bike. Die Kombination der vibroakustischen Übertragungsfunktionen, die durch die numerische Simulation vorhergesagt wurden, mit den in-situ blockierten Kräften, die aus tatsächlichen Messungen abgeleitet wurden, ermöglicht es uns, den realen Klang des E-Bike-Prototyps vorherzusagen.
In den frei zugänglichen Veröffentlichungen [1, 2] haben wir die Vorhersagen unseres hybriden NVH-Modellierungsansatzes durch Messungen validiert, wodurch wir die Genauigkeit der erreichbaren Vorhersagen bewerten konnten (siehe Abb. 2).

Bei den Messungen des Serienmodells lassen sich zwei potenziell kritische Betriebszustände erkennen, die in Abb. 2 links mit weißen Ellipsen markiert sind. Der erste Betriebszustand liegt in der Mitte des Hochlaufs, der zweite am Ende. Kombiniert man das numerische Modell des Prototyps mit der experimentell abgeleiteten Anregung der seriellen Antriebseinheit, so lässt sich vorhersagen, dass der erste potenziell kritische Betriebszustand von der Mitte des Hochlaufs zum Anfang des Hochlaufs verschoben wird (siehe Abb. 2 in der Mitte). Die Validierungsmessung des Prototyps (siehe Abb. 2 rechts) zeigt, dass wir richtig lagen.
Perzeption und Psychoakustik
Wie Menschen Schall wahrnehmen, ist oft wichtiger als der Gesamtschalldruckpegel. Die menschliche Wahrnehmung ist sehr individuell und hängt davon ab, wie gut die Erwartungen des Benutzers an den Klang und der tatsächlich wahrgenommene Klang übereinstimmen. Daher kann es schwierig sein, zu verallgemeinern, wie "gut" ein Geräusch ist. Psychoakustische Parameter, die durch Jurytests entwickelt und validiert wurden, sind jedoch ein bewährtes Instrument bei experimentellen Messungen zur Quantifizierung der menschlichen Wahrnehmung spezifischer akustischer Phänomene wie Tonalität, Rauheit und Lautstärke.
Mit Hilfe der Simulation können wir beurteilen, wie Menschen die akustischen Eigenschaften eines Produkts wahrnehmen, lange bevor es in der realen Welt existiert. Allerdings ist eine hohe Genauigkeit erforderlich, um die Analyse der numerischen Ergebnisse mit psychoakustischen Parametern möglich und sinnvoll zu machen. Glücklicherweise werden die numerischen Berechnungen immer besser, denn ...
- die Leistung und Verfügbarkeit der Hardware steigt und ermöglicht detailliertere Modelle,
- anspruchsvollere Methoden zur Modellierung spezifischer physikalischer Phänomene entwickelt werden und
- hybride Modellierungsansätze ermöglichen die Kopplung von testbasierten Modellen mit numerischen Modellen (wie dem hier vorgestellten), was zu mehr Flexibilität bei der Auswahl der optimalen Methode/des optimalen Modells für die jeweilige Aufgabe oder Teilaufgabe führt.
In Abb. 3 sieht man, wie die psychoakustische Analyse der numerischen Ergebnisse mit der im vorigen Kapitel besprochenen Analyse allein auf der Grundlage des Schalldruckpegels übereinstimmt und diese ergänzt.
Die in Abb. 3 dargestellte Analyse der wahrgenommenen Tonalität entspricht den potenziell kritischen Betriebsarten, die bei der Analyse des Schalldruckpegels in Abb. 2 ermittelt wurden. Die Messung des schwarz dargestellten Serienmodells zeigt eine Spitze in der Mitte des Hochlaufs (80-85 U/min) und steigt gegen Ende des Hochlaufs auf einen Maximalwert an. Das Hybridmodell (rote Kurve) sagt voraus, dass die Spitze in der Mitte des Hochlaufs für den Prototyp zu niedrigeren Drehzahlen verschoben ist. Die Messung des Prototyps bestätigt diese Vorhersage (grüne Kurve).
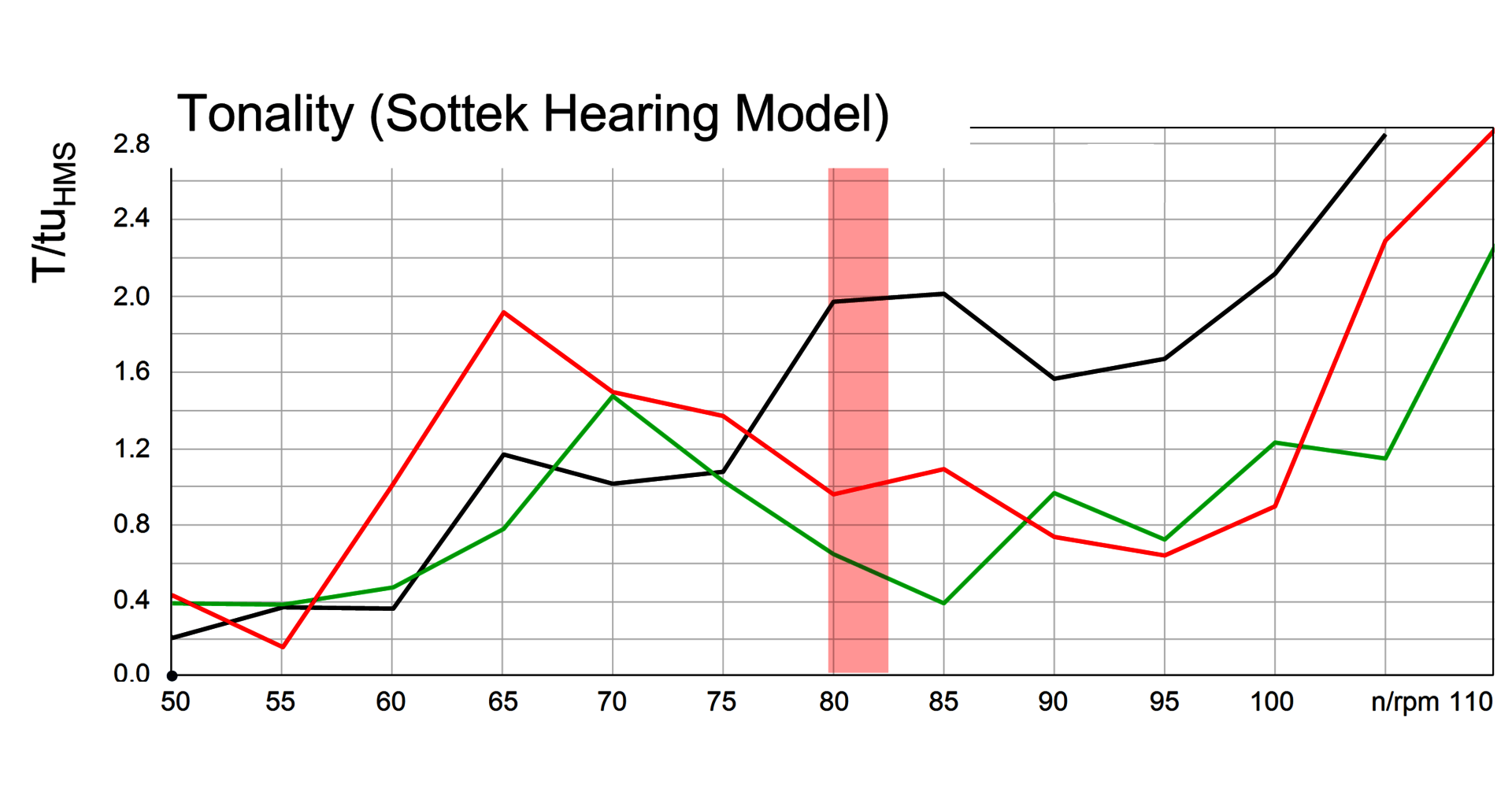
Fig. 3 Vergleich der wahrgenommenen Tonalität (schwarz: gemessenes Serienmodell; rot: berechneter Prototyp; grün: gemessener Prototyp)
Dies ist nur ein Beispiel für die Ergebnisse, die wir in unseren Veröffentlichungen [1,2] liefern, aber es zeigt bereits, wie Sie mit unserem hybriden NVH-Modellierungsansatz und der psychoakustischen Analyse einen großen Schritt von der reinen Simulation der akustischen Eigenschaften Ihres zukünftigen Produkts zur Analyse der vorhergesagten menschlichen Wahrnehmung machen können.
Sie können sich die Ergebnisse sogar anhören und Ihr Produkt erleben, bevor es als Prototyp existiert, was Ihnen einen starken Wettbewerbsvorteil verschafft.
Quellenangaben
[1] M. Wegerhoff, T. Kamper, H. Brücher, and R. Sottek, “Hybrid NVH modeling approach: How numerical and experimental methods complement each other”, Engineering Modelling, Analysis and Simulation, vol. 1, Jan. 2024. https://doi.org/10.59972/4f576ll9
[2] T. Kamper, M. Wegerhoff, H. Brücher and R. Sottek, “Hybrid NVH modeling approach: High quality of NVH results enables psychoacoustic analysis of numerical computations,” Engineering Modelling, Analysis and Simulation, vol. 1, Jan. 2024. https://doi.org/10.59972/pvt6hrtg
[3] M. V. van der Seijs, D. de Klerk, and D. J. Rixen, “General framework for transfer path analysis: History, theory and classification of techniques,” Mechanical Systems and Signal Processing, vol. 68–69, pp. 217–244, Feb. 2016, doi: doi.org/10.1016/j.ymssp.2015.08.004.