
Modélisation NVH hybride
La réduction constante des délais développement et des coûts implique que les décisions de conception importantes doivent être prises tôt dans le processus de développement. Cette démarche impose l’utilisation de prototypes virtuels. Combiner la simulation et les essais peut encore davantage permettre d’améliorer le gain de temps et de réduire les coûts : la précision des résultats peut être clairement améliorée par rapport aux approches basées uniquement soit sur des modèles numériques soit sur des mesures. Il est essentiel de choisir l'approche optimale en fonction de la tâche et de la disponibilité des données (pour construire des prototypes virtuels), des méthodes (pour modéliser certains phénomènes physiques) et des prototypes physiques. Dans un monde connecté, où le processus de développement est réparti entre différentes entreprises, la disponibilité des données et des prototypes physiques devient encore plus critique : Les entreprises doivent partager les caractéristiques des produits pour créer des modèles de systèmes, mais ne souhaitent pas nécessairement partager leurs connaissances en matière de développement ou les détails de la conception des produits.
Un exemple concret
Dans cet article, a partir de l’exemple d’un vélo électrique, nous vous montrons comment la méthode hybride combinant mesure et simulation numérique permet de prédire et d’analyser les propriétés NVH (bruit & vibrations), et répond ainsi à tous les besoins et contraintes mentionnées précédemment.
Dans ce cas précis, nous installons virtuellement l'unité d'entraînement d'un vélo électrique déjà produit en série, dans un modèle numérique d'un nouveau prototype de vélo électrique, comme le montre l'image ci-dessous.

Le modèle basé sur les essais
L'excitation et la dynamique structurelle de l'unité d'entraînement électrique sont dérivées d'expériences utilisant la méthode des forces équivalentes (EF), mieux connue sous le nom de forces bloquées in situ [1, 3]. Vous connaissez peut-être ce type de description de la source par l'analyse expérimentale des voies de transfert. Pour transférer ces "forces descriptives de la source" d'un cas d'essai à un modèle de simulation, ces forces doivent être exclusivement une propriété de la source (notre unité d'entraînement) plutôt que d'appartenir à la structure réceptrice (l'assemblage qui maintient l'unité d'entraînement).
Cela signifie que les forces bloquées in situ de l'unité d'entraînement électrique sont les mêmes pour l'entraînement électrique monté dans un prototype ou un vélo électrique de série - et c'est pourquoi nous avons besoin de forces bloquées in situ plutôt que de forces opérationnelles directement mesurées, qui sont des propriétés à la fois de la source et de la structure qui maintient la source.
Le modèle numérique
Par ailleurs, nous construisons un modèle numérique pour prédire la dynamique structurelle du prototype de vélo électrique, à l'aide d'une méthode ascendante. Dans ce cas, le terme méthode ascendante signifie que le système est divisé en plusieurs sous-modèles que nous pouvons valider séparément. Pour chaque sous-modèle, le niveau de détail et le degré d'abstraction correspondent aux données disponibles et au problème que nous voulons résoudre. Le modèle numérique comprend l'unité d'entraînement, la batterie, le cadre, la fourche, le bras oscillant arrière, la roue avant et les amortisseurs avant et arrière. Dans ce cas, nous supposons que le cadre du vélo électrique, en particulier son tube inférieur, émet le plus d'énergie acoustique, et qu'il doit donc être modélisé comme une pièce flexible.
L'un des défis était le cadre en plastique renforcé de fibres de carbone, ce qui signifiait que nous devions tenir compte de l'épaisseur, de l'orientation et des propriétés des matériaux des différentes couches. Nous avons supposé que la batterie et l'unité d'entraînement affectaient également la dynamique structurelle du vélo électrique, mais aucune donnée n'est disponible pour ces composants. Nous avons donc effectué des analyses modales dans le cadre d'études préliminaires afin de déterminer le comportement des structures des différents composants.
Le modèle hybride
Nous avons couplé le modèle numérique de la dynamique structurelle avec un modèle qui prédit le rayonnement au moyen des vélocités de surface sur le cadre (voir fig. 1). Les deux modèles s'ajoutent à un ensemble de fonctions de transfert vibroacoustique à partir de différents points d'excitation à l'interface entre l'entraînement électrique et le cadre vers différents microphones autour de l'e-bike. La combinaison des fonctions de transfert vibroacoustique prédites par la simulation numérique et des forces bloquées in situ dérivées des mesures réelles nous permet de prédire le son réel du prototype de vélo électrique.
Dans nos articles en libre accès [1, 2], nous avons validé les prédictions de notre approche hybride de modélisation NVH par des mesures, ce qui nous a permis d'évaluer la précision des prédictions réalisables (voir fig. 2).

Dans les mesures du modèle en série, nous pouvons identifier deux états opérationnels potentiellement critiques, marqués à gauche de la figure 2 par des ellipses blanches.
Le premier mode de fonctionnement se situe au milieu de la course d'élan, et le second à la fin. En combinant le modèle numérique du prototype avec l'excitation expérimentale de l'unité d'entraînement en série, nous pouvons prédire que le premier mode de fonctionnement potentiellement critique est déplacé du milieu de la course d'élan au début de la course d'élan (voir fig. 2 au milieu). La mesure de validation du prototype (voir la figure 2 à droite) montre que la prédiction était bonne.
Perception et psychoacoustique
La manière dont les êtres humains perçoivent le son est souvent plus importante que le niveau de pression acoustique global. La perception humaine est très individuelle et dépend de l'adéquation entre les attentes de l'utilisateur et le son réellement perçu. Par conséquent, il peut être difficile de généraliser la "qualité" d'un son. Cependant, les paramètres psychoacoustiques développés et validés par des tests de jury sont un outil établi dans les mesures expérimentales pour quantifier la perception humaine de phénomènes acoustiques spécifiques tels que la tonalité, la rugosité et l'intensité sonore.
Grâce à la simulation, nous pouvons évaluer la manière dont les humains perçoivent les propriétés acoustiques d'un produit bien avant qu'il n'existe dans le monde réel. Cependant, une grande précision est nécessaire pour que l'analyse des résultats numériques avec des paramètres psychoacoustiques soit possible et significative. Heureusement, les calculs numériques s'améliorent continuellement grâce notamment :
- aux performances et à la disponibilité du matériel, ce qui permet d'obtenir des modèles plus détaillés,
- à des méthodes plus sophistiquées qui sont développées pour modéliser des phénomènes physiques spécifiques, et
- aux approches de modélisation hybrides, qui permettent de coupler (comme présenté ici) des modèles basés sur des essais avec des modèles numériques, ce qui permet une plus grande flexibilité dans la sélection de la méthode optimale pour la tâche ou la sous-tâche spécifique.
La figure 3 montre comment l'analyse psychoacoustique des résultats numériques enrichit l'analyse basée uniquement sur le niveau de pression acoustique présentée dans le chapitre précédent.
L'analyse de la tonalité perçue présentée à la figure 3 correspond aux modes de fonctionnement potentiellement critiques identifiés lors de l'analyse du niveau de pression acoustique présentée à la figure 2. La mesure du modèle en série représenté en noir montre un pic au milieu de la montée en régime (80-85 tr/min) et augmente jusqu'à une valeur maximale vers la fin de la montée en régime. Le modèle hybride (courbe rouge) prédit que le pic au milieu de la montée en régime est déplacé vers des vitesses plus basses pour le prototype. Les mesures effectuées sur le prototype confirment cette prédiction (courbe verte).
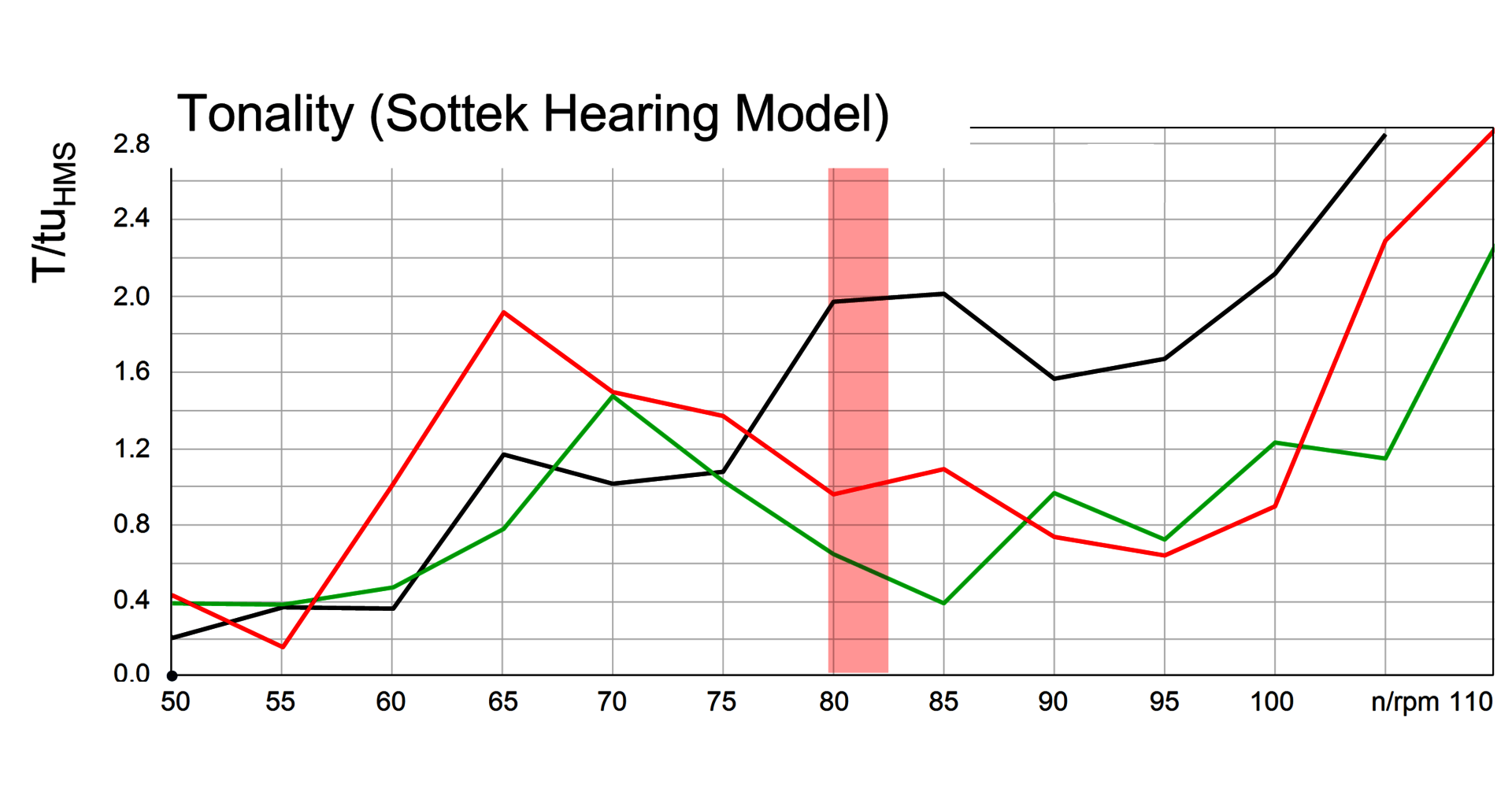
Fig. 3 Comparaison de la tonalité perçue (noir : son mesuré du modèle en série ; rouge : son prédit du prototype ; vert : son mesuré du prototype). La barre rouge dans le diagramme marque le segment de temps que vous pouvez écouter ci-dessous.
Ce n'est qu'un exemple des résultats que nous fournissons dans nos articles [1,2], mais il montre déjà comment vous pouvez faire un grand pas en avant en passant de l'imagination pure des propriétés acoustiques de votre futur produit à l'analyse de la perception humaine prédite en utilisant notre approche hybride de modélisation NVH et de son analyse psychoacoustique.
Vous pouvez même écouter et expérimenter votre produit avant qu'il n'existe en tant que prototype, ce qui vous donne un avantage concurrentiel important.
Sources
[1] M. Wegerhoff, T. Kamper, H. Brücher, and R. Sottek, “Hybrid NVH modeling approach: How numerical and experimental methods complement each other”, Engineering Modelling, Analysis and Simulation, vol. 1, Jan. 2024. https://doi.org/10.59972/4f576ll9
[2] T. Kamper, M. Wegerhoff, H. Brücher and R. Sottek, “Hybrid NVH modeling approach: High quality of NVH results enables psychoacoustic analysis of numerical computations,” Engineering Modelling, Analysis and Simulation, vol. 1, Jan. 2024. https://doi.org/10.59972/pvt6hrtg
[3] M. V. van der Seijs, D. de Klerk, and D. J. Rixen, “General framework for transfer path analysis: History, theory and classification of techniques,” Mechanical Systems and Signal Processing, vol. 68–69, pp. 217–244, Feb. 2016, doi: doi.org/10.1016/j.ymssp.2015.08.004.